
工作原理及其组成其中一共包括(M4R 工作原理、M4R组成)M4R 的数学模型(坐标系定义)
在M4R 工作原理:M4R的基本结构如图2.1所示。M4R的4只旋
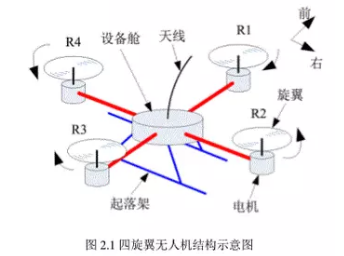
翼安装于十字形机体的4个顶点位置,分为顺时针旋转(1、3)和逆时针旋转(2、4)两组。当4只旋翼转速相等时,相互间抵消反扭力矩。
M4R具有以下几种可控的基本运动形式:
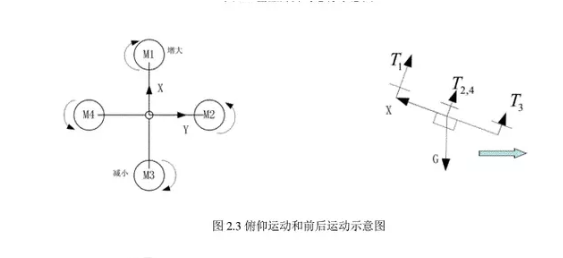
1.垂直升降与悬停:同时增加或减小4只旋翼的转速,进而改变施加于M4R上的升力大小,当升力总和大于或者小于M4R自身重力时,M4R实现垂直上升或者下降运动:当升力总和等于自身重力时,M4R处于悬停状态。垂直升降与悬停的控制方式如图2.2所示。
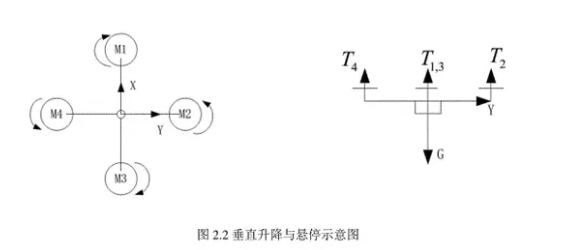
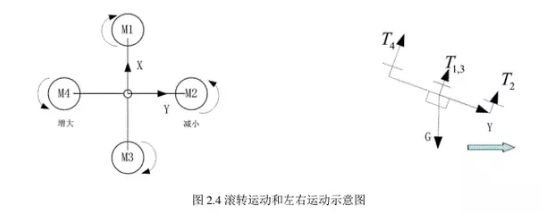
2.俯仰运动和前后运动当2号和4号旋翼转速固定,1号旋翼转速增加(减小),3号旋翼转速减小(增加),1、3号电机转速的差使得无人机抬头(低头),从而使升力在沿x轴方向产生分量,从而实现后退(前进)飞行。具体运动示意图如图2.3所示。3.滚转运动和左右运动当1号和3号旋翼转速固定,2号旋翼转速减小(增加),4号旋翼转速增加(减小),无人机实现向右(向左)飞行。2、44号电机转速的差使得无人机右倾(左倾),从而使升力在沿y方向产生分量,
从而实现向右(向左)飞行。具体运动示意图如图 2.4所示。
4.偏航运动当1号和3号旋翼转速增大(减小),同时2号和4号旋翼转速减小(增大),无人机实现左偏航(右偏航)飞行。
在 M4R组成:M4R 由旋翼、无刷电机、无刷电调、电源、起落架、飞行控制器、遥控接收机、GPS 接收机和机体等部分组成[8]。各组成部分功能如下:
1.执行机构,M4R的执行机构由四对无刷电调和无刷电机组成。该执行机构接收来自飞行控制器的控制量驱动电机带动旋翼转动,为M4R提供飞行所需的全部升力。通过改变4个旋翼的转动速度,改变无人机的飞行姿态进而使无人机实现前进、后退、偏航等运动;
2.飞行控制系统,,M4R的飞行控制系统由飞行控制计算机、姿态参考系统、遥控接收机、GPS接收机等组成。由于旋翼无人机受振动影响极大,为了获取正确的飞行姿态角,以上组成部分必须通过刚性连接的方式安装在机身上,并采取相应减振措施;3.机体和起落架,M4R的机体由碳纤维材料制成,起落架由铝合金板制成。起落架同机身相连,成十字形分布,一定高度的起落架能减小地面效应在无人机起飞和着落时带来的影响。
在M4R 的数学模型:
坐标系定义
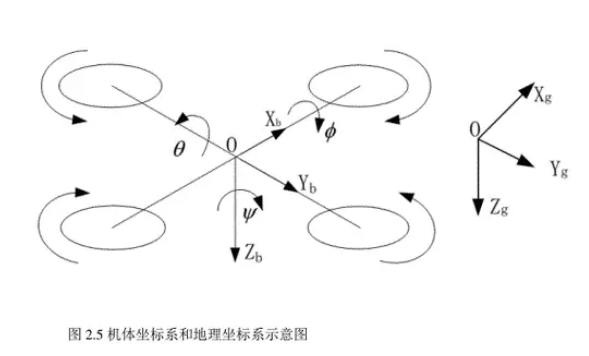
常见的坐标系有地理坐标系、机体坐标系、气流轴坐标系、速度坐标系、航迹坐标系等。M4R的运动包含绕三个轴的角运动及沿三个轴的线运动。为了描述其转动必须选用机体坐标系或速度坐标系;为了确定具体飞行位置,必须选用地理坐标系。因此本文选取地面坐标系和机体坐标来进行数学建模。图2.5为机体坐标系O,X么和地理坐标系O,X,Y2,的示意图。



©版权所有 2014-2022 北极鸥航空科技(山东)集团有限公司 鲁ICP备2024078815号-1